標(biāo)題: Titlebook: ROMANSY 11; Theory and Practice Adam Morecki,Giovanni Bianchi,Cezary Rzymkowski Book 1997 Springer-Verlag Wien 1997 control.design.develop [打印本頁(yè)] 作者: 從未沮喪 時(shí)間: 2025-3-21 20:07
書(shū)目名稱ROMANSY 11影響因子(影響力)
書(shū)目名稱ROMANSY 11影響因子(影響力)學(xué)科排名
書(shū)目名稱ROMANSY 11網(wǎng)絡(luò)公開(kāi)度
書(shū)目名稱ROMANSY 11網(wǎng)絡(luò)公開(kāi)度學(xué)科排名
書(shū)目名稱ROMANSY 11被引頻次
書(shū)目名稱ROMANSY 11被引頻次學(xué)科排名
書(shū)目名稱ROMANSY 11年度引用
書(shū)目名稱ROMANSY 11年度引用學(xué)科排名
書(shū)目名稱ROMANSY 11讀者反饋
書(shū)目名稱ROMANSY 11讀者反饋學(xué)科排名
作者: AXIOM 時(shí)間: 2025-3-22 00:13
ROMANSY 11978-3-7091-2666-0Series ISSN 0254-1971 Series E-ISSN 2309-3706 作者: 逗它小傻瓜 時(shí)間: 2025-3-22 02:35 作者: Harness 時(shí)間: 2025-3-22 08:27
Modeling and Optimization of the Tube-Crawling Robotzation of structural parameters and possible gaits of the robot is discussed. The results obtained by computer simulation show a considerable sensitivity of operation characteristics of the robot with respect to its geometrical and kinematical parameters.作者: deadlock 時(shí)間: 2025-3-22 12:23 作者: Urgency 時(shí)間: 2025-3-22 15:04 作者: mastoid-bone 時(shí)間: 2025-3-22 18:41
CISM International Centre for Mechanical Scienceshttp://image.papertrans.cn/r/image/820234.jpg作者: 共同生活 時(shí)間: 2025-3-23 00:04
Book 1997The CISM-IFToMM RoManSy Symposia have played a dynamic role in the development of the theory and practice of robotics. The proceedings of the eleven symposia to date present a world view of the state of the art. The proceedings of this eleventh edition focus mainly on problems of mechanical engineering and control.作者: avarice 時(shí)間: 2025-3-23 04:42
https://doi.org/10.1007/978-3-7091-2666-0control; design; development; mechanical engineering; mechanics; robot; robotics作者: Flu表流動(dòng) 時(shí)間: 2025-3-23 06:02
Mobile Manipulator Systemspplications, consideration of vehicle/arm dynamics is essential for robot coordination and control. This article discusses the inertial properties of holonomic mobile manipulation systems and presents the basic strategies developed for their dynamic coordination and control. These strategies are bas作者: 比喻好 時(shí)間: 2025-3-23 13:29 作者: ABASH 時(shí)間: 2025-3-23 14:53
Modeling and Optimization of the Tube-Crawling Robotzation of structural parameters and possible gaits of the robot is discussed. The results obtained by computer simulation show a considerable sensitivity of operation characteristics of the robot with respect to its geometrical and kinematical parameters.作者: Modicum 時(shí)間: 2025-3-23 20:26 作者: 陰險(xiǎn) 時(shí)間: 2025-3-24 01:33 作者: 負(fù)擔(dān) 時(shí)間: 2025-3-24 03:31 作者: 使隔離 時(shí)間: 2025-3-24 08:56
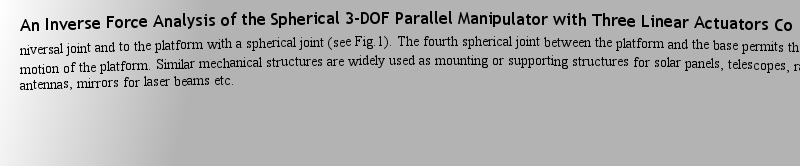
An Inverse Force Analysis of the Spherical 3-DOF Parallel Manipulator with Three Linear Actuators Coniversal joint and to the platform with a spherical joint (see Fig.1). The fourth spherical joint between the platform and the base permits the spherical motion of the platform. Similar mechanical structures are widely used as mounting or supporting structures for solar panels, telescopes, radar and作者: 協(xié)迫 時(shí)間: 2025-3-24 11:05 作者: 公司 時(shí)間: 2025-3-24 16:39
Nonlinear Dynamics of Computer Controlled Machinestabilized by means of some control, the task can be considered as a position or force control of a system with negative stiffness. Analytical investigation of simple models with 1–2 DOF have a central role in understanding technical phenomena and in forming the common sense in design work. Basic tex作者: Cerebrovascular 時(shí)間: 2025-3-24 22:12
Identification and Compensation of Gear Friction for Modeling of Robotsliminate the dominant influence of friction in gears and joints a nonlinear friction model is adapted to measured friction characteristics. Its influence is compensated in the identification step. The base parameter vector is grouped and optimal trajectories are used to identify each group. The qual作者: esthetician 時(shí)間: 2025-3-24 23:22
Designing Manipulators for Both Kinematic and Dynamic Isotropic Propertiesequalities between the condition numbers of the Jacobian matrix and matrices that represent dynamic characteristics of such robots. We show that designing a manipulator for good isotropicity of velocity (acceleration) distribution may lead to an arm with poor uniformity of acceleration (velocity) di作者: Flirtatious 時(shí)間: 2025-3-25 05:42
Group Theoretical Synthesis of Binary Manipulatorsnary manipulators constructed from pneumatic cylinders are both light weight and inexpensive, requiring minimal feedback hardware and trivial computer interfaces. However, for the benefits of binary actuation to be realized, methods developed in the pure mathematics literature over that past thirty 作者: 帶子 時(shí)間: 2025-3-25 07:40 作者: Humble 時(shí)間: 2025-3-25 13:24
Optimal Design of a Shape Memory Alloy Actuator for Microgrippers combination of two SMA actuators installed on the links of a special mechanism: one of them drives the rotation of the joint and the other one produces the necessary force to manipulate objects. An accurate model of the thermo-mechanical behavior of SMA fibers is proposed for the design of SMA actu作者: 諂媚于人 時(shí)間: 2025-3-25 17:16
Workspaces of Planar Parallel Manipulatorsne orientation in a given range, can be obtained. Then, the . workspace, i.e., the region which can be reached by point . with every orientation of the platform in a given range, is determined. Three types of planar parallel manipulators are described and one of them is used to illustrate the algorithms.作者: evasive 時(shí)間: 2025-3-25 23:41
Designing Manipulators for Both Kinematic and Dynamic Isotropic Propertiesstribution. We present necessary and sufficient conditions for having both good kinematic and dynamic isotropic properties, and illustrate these concepts with results obtained for a 2R planar manipulator.作者: Dysarthria 時(shí)間: 2025-3-26 00:25
Group Theoretical Synthesis of Binary Manipulatorsyears must be used to make the design and inverse kinematics of these manipulators tractable. As is demonstrated, the Fourier transform of functions on the Euclidean motion group is a powerful tool which can be used to this end.作者: dry-eye 時(shí)間: 2025-3-26 07:59
Distributed Kinematic Design from Task Specificationn of this paper is a distributed method for the kinematic design from task specification of all kinds of manipulators. The proposed methodology is illustrated with the synthesis of planar mechanisms and a 6-degrees-or-freedom manipulator.作者: 無(wú)聊的人 時(shí)間: 2025-3-26 12:19 作者: 免費(fèi) 時(shí)間: 2025-3-26 13:35 作者: LATHE 時(shí)間: 2025-3-26 18:15
Nonlinear Control of a Parallel Robot Including Motor Dynamics perturbation method. To validate the proposed corrective controller, the passivity concept and singular perturbation techniques are considered. Simulation tests are presented that confirm the efficiency of the proposed nonlinear control law.作者: 2否定 時(shí)間: 2025-3-26 23:59 作者: NEEDY 時(shí)間: 2025-3-27 01:53
Optimal Design of a Shape Memory Alloy Actuator for Microgripperses the necessary force to manipulate objects. An accurate model of the thermo-mechanical behavior of SMA fibers is proposed for the design of SMA actuators. The main performances of this microactuator are presented and discussed.作者: 旁觀者 時(shí)間: 2025-3-27 05:49
0254-1971 e eleven symposia to date present a world view of the state of the art. The proceedings of this eleventh edition focus mainly on problems of mechanical engineering and control.978-3-211-82903-5978-3-7091-2666-0Series ISSN 0254-1971 Series E-ISSN 2309-3706 作者: 啜泣 時(shí)間: 2025-3-27 11:09
Towards Reducing Thruster-Flexibility Interactions in Space Robotslternative controller-estimator schemes, and to conduct a parametric study on the influence of key system parameters. Design guidelines and a state-estimator are suggested that can minimize such undesirable dynamic interactions as well as thruster fuel consumption.作者: Aspirin 時(shí)間: 2025-3-27 15:14 作者: CERE 時(shí)間: 2025-3-27 19:02
J. Lee,J. Duffy,M. Keleriet ist der Generatorbetrieb. Sie arbeitet als Generator in unseren kraftwerken und speist unsere elektrischen Energienetze mit Wirkleistung. Die ans Netz angeschlossenen Verbraucher nehmen jedoch nicht nur Wirkleistung auf, sondern brauchen zu ihrem Betrieb zum Teil auch Blindleistung. Zu den Blind作者: granite 時(shí)間: 2025-3-27 22:33 作者: gusher 時(shí)間: 2025-3-28 05:10 作者: MOAT 時(shí)間: 2025-3-28 06:15 作者: eustachian-tube 時(shí)間: 2025-3-28 11:14 作者: 商業(yè)上 時(shí)間: 2025-3-28 15:09
Nonlinear Dynamics of Computer Controlled Machinesantization have a strong effect on the system behavior. This nonlinearity is very strong locally, and often results in some small amplitude stochastic oscillation of the robot around its desired end position. The paper will show the chaotic nature of these oscillations and some ways to characterize 作者: 搖曳的微光 時(shí)間: 2025-3-28 22:20 作者: Anthrp 時(shí)間: 2025-3-28 23:50 作者: 母豬 時(shí)間: 2025-3-29 05:20 作者: 美學(xué) 時(shí)間: 2025-3-29 09:05
R. Cieslak,A. Moreckingung in den Rotorst?ben hier noch au?er acht bleibt. Das System gekoppelter gew?hnlicher Differentialgleichungen ist so formuliert, dass es gleicherma?en für Schleifring- und Kurzschlussl?ufermaschinen gilt. Mit der Transformation in ein gemeinsames Koordinatensystem wird eine Form angegeben, die f作者: 歸功于 時(shí)間: 2025-3-29 12:51
M. Schneider,M. Hiller) Spulen. Mehrstr?ngige ortsfeste Wicklungen dienen h?ufig zur Erzeugung von rotierenden Feldern; darum sind an dieser Stelle einige Betrachtungen zu Drehfeldern eingefügt..Der Wicklungsaufbau für die zwei Grundtypen wird detailliert beschrieben, da sie vielf?ltige Anwendungen haben als Ankerwicklun作者: Chagrin 時(shí)間: 2025-3-29 18:21
Bitcoin Data Analytics: Exploring Research Avenues and Implementing a Hadoop-Based Analytics Framewothis article presents a survey of the recent advancements done regarding the big data analytics of the Bitcoin Cryptocurrency. Furthermore, we propose an analysis framework based on the Apache Hadoop ecosystem.作者: placebo-effect 時(shí)間: 2025-3-29 23:36
https://doi.org/10.1007/978-1-4615-6704-2etically predicted moduli the characteristic lengths in bending, ., calculated from the numerical data appear to differ from the theoretical forecasts. Moreover, the computational representations indicate that finite sized material samples are capable of exhibiting size effects not predicted by the 作者: Affiliation 時(shí)間: 2025-3-30 02:59
John Tierneylishing and electron microscopy. Today, FIB-based site-specific specimen creation is routine and electropolishing is often only used when it is more practical. While the use of thermal pulsing is necessary for materials that cannot be evaporated successfully with field pulsing, thermal pulsing also 作者: CHARM 時(shí)間: 2025-3-30 06:59
Ionization and Excitation by Photon Impact at Higher Energies,tability of the sum of the contribution to the Compton scattering cross section coming from the soft scattered photons and the photoionization cross section that includes the radiative corrections. At still larger photon energies exceeding certain value ., the ions are produced mainly accompanied by作者: 圖表證明 時(shí)間: 2025-3-30 08:49 作者: 強(qiáng)化 時(shí)間: 2025-3-30 13:05 作者: 泛濫 時(shí)間: 2025-3-30 19:11
Josef Held,Seddik Bibouche,Lucie Billmann,Melanie Holbein,Martina Kempf,Tobias Kr?lld, der heute für praktisch alle Berufsausrichtungen unentbehrlich ist. Im Rahmen dieser übersicht wird das breite Spektrum der Methoden und Werkzeuge moderner Informationsverarbeitung, wie es heute in der Wirtschaftsinformatik und Angewandten Informatik ben?tigt wird, abgedeckt. Insbesondere an Stud作者: 大雨 時(shí)間: 2025-3-31 00:27
2662-3684 banking works.Systematically analyses and evaluates proposal.This Open Access book from the Netherlands Scientific Council for Government Policy explains how money creation and banking works, describes the main problems of the current monetary and financial system and discusses several reform option