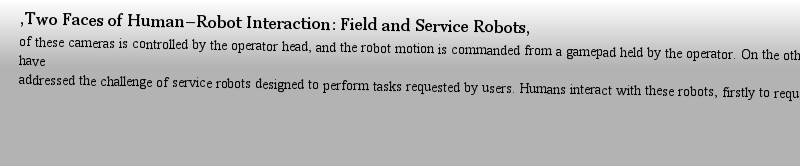
標(biāo)題: Titlebook: New Trends in Medical and Service Robots; Challenges and Solut Aleksandar Rodi?,Doina Pisla,Hannes Bleuler Book 2014 Springer International [打印本頁(yè)] 作者: 無(wú)法生存 時(shí)間: 2025-3-21 17:58
書目名稱New Trends in Medical and Service Robots影響因子(影響力)
書目名稱New Trends in Medical and Service Robots影響因子(影響力)學(xué)科排名
書目名稱New Trends in Medical and Service Robots網(wǎng)絡(luò)公開度
書目名稱New Trends in Medical and Service Robots網(wǎng)絡(luò)公開度學(xué)科排名
書目名稱New Trends in Medical and Service Robots被引頻次
書目名稱New Trends in Medical and Service Robots被引頻次學(xué)科排名
書目名稱New Trends in Medical and Service Robots年度引用
書目名稱New Trends in Medical and Service Robots年度引用學(xué)科排名
書目名稱New Trends in Medical and Service Robots讀者反饋
書目名稱New Trends in Medical and Service Robots讀者反饋學(xué)科排名
作者: archetype 時(shí)間: 2025-3-21 22:06
New Trends in Medical and Service Robots978-3-319-05431-5Series ISSN 2211-0984 Series E-ISSN 2211-0992 作者: gustation 時(shí)間: 2025-3-22 01:19 作者: extinguish 時(shí)間: 2025-3-22 05:59
Mechanisms and Machine Sciencehttp://image.papertrans.cn/n/image/665991.jpg作者: 可用 時(shí)間: 2025-3-22 09:21
https://doi.org/10.1007/978-3-319-05431-5Cognitive Robots; Medical Robots; Robot Control; Robot Mechanics; Service Robots作者: 易碎 時(shí)間: 2025-3-22 16:03
The Robot that Learns from the Therapist How to Assist Stroke Patients,. The major novelties that the 3D arm assistant brings are the following: an automatic method of capturing movements presented by the therapist (expert), the use of the probabilistic movement representation for control of the robot, the incorporation of simple gaming with adjustable levels of diffic作者: Charlatan 時(shí)間: 2025-3-22 18:12
Lower Limbs Robotic Rehabilitation Case Study with Clinical Trials,trical stimulation. In the second clinical study, the academic MotionMaker has been used with 5 paraplegic subjects to evaluate the voluntary force progress and the reduction of the spastic behavior. Finally, the last clinical study describes the use of the commercial MotionMaker provided by the Swi作者: 可卡 時(shí)間: 2025-3-23 00:01 作者: 權(quán)宜之計(jì) 時(shí)間: 2025-3-23 04:48 作者: 公司 時(shí)間: 2025-3-23 06:42 作者: 利用 時(shí)間: 2025-3-23 11:56 作者: 負(fù)擔(dān) 時(shí)間: 2025-3-23 14:30
Some Applications of Biomimetics and Fractional Calculus in Control and Modeling of (Bio)robotic Syem with 3 DOFs driven by DC motors. Also, a chattering-free fractional . sliding-mode controller in the control of a given robotic system has been proposed and realized. The effectiveness of the proposed optimal fractional order controls are demonstrated by the given robot. Finally, it is shown that作者: 擔(dān)心 時(shí)間: 2025-3-23 19:49 作者: 顧客 時(shí)間: 2025-3-24 00:12
Brain Incorporation of Artificial Limbs and Role of Haptic Feedback,ow the importance of a coherent haptic feedback for the emergence of embodiment. We will also present a test platform for studying the mechanisms of incorporation by using advanced haptic interfaces on the master-side and VR environments on the slave side of a telemanipulator aimed at endoscopic sur作者: 合乎習(xí)俗 時(shí)間: 2025-3-24 05:43 作者: 意見一致 時(shí)間: 2025-3-24 09:02 作者: 我悲傷 時(shí)間: 2025-3-24 13:57
A. Sengul,S. Shokur,H. Bleulercourses. It can be used for self-study and will be of interest to applied scientists or engineers wishing to use advanced methods in modeling and identification of complex systems..978-1-84996-988-8978-1-84628-158-7Series ISSN 0178-5354 Series E-ISSN 2197-7119 作者: 武器 時(shí)間: 2025-3-24 17:27 作者: 撫慰 時(shí)間: 2025-3-24 19:57
D. Tarnita,M. Catana,D. N. Tarnitacourses. It can be used for self-study and will be of interest to applied scientists or engineers wishing to use advanced methods in modeling and identification of complex systems..978-1-84996-988-8978-1-84628-158-7Series ISSN 0178-5354 Series E-ISSN 2197-7119 作者: 盟軍 時(shí)間: 2025-3-25 00:38 作者: 發(fā)炎 時(shí)間: 2025-3-25 06:36 作者: patriot 時(shí)間: 2025-3-25 11:25
M. Bouri,E. Abdi,H. Bleuler,F. Reynard,O. Deriaz Datenbestand initiieren. Im Gegensatz zu einer derartigen Vollauswertung scheint eine inkrementelle Auswertung von Subskriptionen, wie sie in diesem Kapitel allgemein und im Kontext spezifischer L?sungsans?tze diskutiert wird, sowohl aus Sicht der Anwendung notwendig als auch aus Sicht einer effizi作者: linguistics 時(shí)間: 2025-3-25 12:25
P. B. Petrovic,N. Lukic,I. Danilovankbasierter Informationssysteme zu vollziehen, wird in diesem Kapitel vorgenommen, so dass aus allgemeiner Perspektive nach der ablauforientierten Aufarbeitung im vorangegangenen Kapitel die datenzentrierte Sichtweise in den folgenden Ausführungen im Vordergrund steht.作者: ovation 時(shí)間: 2025-3-25 18:18 作者: FEIGN 時(shí)間: 2025-3-25 20:06
B. Karan,?. Golubovi?,M. Gnjatovi?uftreten k?nnen. Ziel ist dabei, ein Netzwerk lose gekoppelter Vermittlungskomponenten aufzubauen, welches transparent für den Endbenutzer einen skalierbaren, logisch zentralen und mit Blick auf reale Produzenten anonymen Subskriptionsdienst realisiert.作者: Orthodontics 時(shí)間: 2025-3-26 03:13
V. Golovin,M. Arkhipov,V. Zhuravlevropical regoliths. We present a pioneering map of the distribution of Brazilian regoliths according to depth to the lithic contact, estimated from soil surveys. It indicates that the shallowest depths are found on resistant rock belts, especially along the quartzitic Espinha?o Range and scattered ar作者: 斜谷 時(shí)間: 2025-3-26 07:45
Ericka Janet Rechy-Ramirez,Huosheng Huseedbank from the original ecosystem, will greatly support root growth and plant development. The subsoil conditions control the growth and development of the root system, which is specifically affected by high bulk density, pans, hardsetting, compaction layers, extreme texture (sandy, silty or clay作者: 單色 時(shí)間: 2025-3-26 08:51
G. Gini,L. Cavazzana,F. Mutti,P. Belluco,A. Maurive fertilizer-supplied nutrients in moist subsoil for longer periods during the growing season. However, the contribution of subsoil nutrition to crop growth is limited by subsoil constraints that restrict deeper rooting, including physical constraints, e.g. gravel layers and soil compaction, and ch作者: MORPH 時(shí)間: 2025-3-26 13:05
A. Rodi?,K. Addivoid instable and inefficient combustion, injectors may be able to allow vaporization and mixing of the liquid fuel with air in a very short time. The fast kinetics speed up the combustion improving its efficiency, i.e., increasing the amount of burned fuel that contributes to the thrust. The rate o作者: notion 時(shí)間: 2025-3-26 19:23 作者: 壓倒 時(shí)間: 2025-3-26 21:37 作者: parsimony 時(shí)間: 2025-3-27 03:44 作者: 運(yùn)動(dòng)吧 時(shí)間: 2025-3-27 05:52 作者: OCTO 時(shí)間: 2025-3-27 12:03 作者: 偏見 時(shí)間: 2025-3-27 16:21 作者: 加花粗鄙人 時(shí)間: 2025-3-27 18:12 作者: 震驚 時(shí)間: 2025-3-28 00:39 作者: 針葉類的樹 時(shí)間: 2025-3-28 05:24 作者: 吹牛者 時(shí)間: 2025-3-28 07:38 作者: Amendment 時(shí)間: 2025-3-28 13:37 作者: 極力證明 時(shí)間: 2025-3-28 15:04
Innovative Approaches Regarding Robots for Brachytherapy,e, where radioactive seeds are delivered directly in the tumor without damaging the proximal healthy tissues. A medical protocol for the robotized brachytherapy procedure is described. Latest achievements in robotic assisted brachytherapy provided by several worldwide research centers are presented.作者: HUSH 時(shí)間: 2025-3-28 22:00 作者: landmark 時(shí)間: 2025-3-29 01:19 作者: ventilate 時(shí)間: 2025-3-29 07:01 作者: Lethargic 時(shí)間: 2025-3-29 08:44 作者: 無(wú)禮回復(fù) 時(shí)間: 2025-3-29 12:08
Mathematical Modeling of Human Affective Behavior Aimed to Design Robot EI-Controller,ore precisely, the chapter concerns with modeling attributes of human emotional intelligence with aim to develop robot EI-controller capable to manage and use emotions, mange relationship with others and increase the autonomy. Brief theoretical background of personality psychology, regarding categor作者: 招待 時(shí)間: 2025-3-29 18:48
Robot Skill Acquisition by Demonstration and Explorative Learning,ed skill. Initial demonstration are parameterized as Dynamic Movement Primitives and stored into a data base of actions. Whenever needed, the robot retrieves previous learned skill from the data-base and generalizes it to a new situation. If the generalization itself cannot generate an appropriate a作者: 喃喃而言 時(shí)間: 2025-3-29 23:00 作者: malapropism 時(shí)間: 2025-3-30 03:25
Advanced Gesture and Pose Recognition Algorithms Using Computational Intelligence and Microsoft KINally steered mobile robot. The designed system is capable of extracting, understanding and learning a sequence of full body gestures and poses, that were previously captured in standard RGB and IC DEPTH videos. The starting set of robot commands in first study case, includes the following 4 postures作者: 反感 時(shí)間: 2025-3-30 06:04
Recursive Design of Dependable Robot Systems for Safety-Critical Applications,nts. Furthermore, modern assistance technology allows the design of highly sophisticated medical devices and the use of medical systems in a more flexible and interactive way. Thus, dependability of the medical system, which is possibly in interaction with the human operator has to be considered add作者: FAWN 時(shí)間: 2025-3-30 11:38 作者: 難理解 時(shí)間: 2025-3-30 14:24
Towards Sensor-Less Haptic Teleoperation,ate system dynamics and performance. The position information, as well as force information, that are required in order to provide high-performance bilateral control, is provided by using miniature analog Hall sensors. Such sensors might be already built within the motor housing. The .-tracker has b作者: inhibit 時(shí)間: 2025-3-30 20:10
Brain Incorporation of Artificial Limbs and Role of Haptic Feedback,n be very different. Typical questions for learning use of a new tool are the level of complexity in manipulation, i.e. learning time and the ergonomy. We ask here these questions from a cognitive neuroscience perspective: How can we promote fast and natural embodiment of a tool? What are the neuron作者: 山羊 時(shí)間: 2025-3-30 21:46
Offline Imitation of a Human Motion by a Humanoid Robot Under Balance Constraint, focuses on the management of the balance constraint. A hybrid approach based on simultaneous time-scaling and joint modification is introduced and takes advantage of both approaches (time-scaling and joint modification) while solving some of their respective drawbacks. The hybrid approach was imple作者: Enthralling 時(shí)間: 2025-3-31 03:18
Contributions on the Modeling and Simulation of the Human Knee Joint with Applications to the Robotndividual components and to study the effects of the frontal plane tibio–femoral angle on the stress distribution in the knee cartilages and menisci. It was developed the geometric models of the joint which shows different tilt in varus and valgus with 5°, the joint being affected by osteoarthritis 作者: 拋媚眼 時(shí)間: 2025-3-31 07:12 作者: 安撫 時(shí)間: 2025-3-31 09:19
M. D. Kosti?,M. D. Popovi?,D. B. Popovi?chten an interessierte Subskribenten zu erm?glichen. Ein derartiges Verfahren kann bereits durch einen einfachen Filter- und Weiterleitungsprozess erfolgen, wie er von einer Vielzahl von Systemen (Kapitel 5) bereits realisiert wird. Neben der reinen Weiterleitung ist es jedoch oftmals sinnvoll, eine作者: 音樂(lè)學(xué)者 時(shí)間: 2025-3-31 15:47
M. Bouri,E. Abdi,H. Bleuler,F. Reynard,O. Deriazchten an interessierte Subskribenten zu erm?glichen. Ein derartiges Verfahren kann bereits durch einen einfachen Filter- und Weiterleitungsprozess erfolgen, wie er von einer Vielzahl von Systemen (Kapitel 5) bereits realisiert wird. Neben der reinen Weiterleitung ist es jedoch oftmals sinnvoll, eine作者: 搖晃 時(shí)間: 2025-3-31 21:33
P. B. Petrovic,N. Lukic,I. DanilovTP, ’.’; [GrRe93]), werden Datenbanksysteme immer mehr in auswertungsorientierten Anwendungsgebieten eingesetzt. Schlagworte wie ’.’ ([BaGü0l], [Inmo92], [Kimb96]), ‘.’ (OLAP; [CoCS93]) oder ’.’ (DSS; [TuAr00]) haben sich in den letzten Jahren einen festen Platz sowohl in der Forschungsgemeinschaft 作者: Radiculopathy 時(shí)間: 2025-3-31 22:34 作者: 歪曲道理 時(shí)間: 2025-4-1 02:08 作者: 人造 時(shí)間: 2025-4-1 07:55
V. Golovin,M. Arkhipov,V. ZhuravlevIt is shown that most regoliths and subsoils in the tropics are polycyclic and not directly attributable to the present-day climates because of inherited features from past climatic conditions. The Brazilian land surface has one of the deepest regolith mantles at a planetary scale, resulting from a