標題: Titlebook: Control of Sandwich Nonlinear Systems; Avinash Taware,Gang Tao Book 2003 Springer-Verlag Berlin Heidelberg 2003 Hybrid Control.Sandwich Co [打印本頁] 作者: MAXIM 時間: 2025-3-21 18:32
書目名稱Control of Sandwich Nonlinear Systems影響因子(影響力)
書目名稱Control of Sandwich Nonlinear Systems影響因子(影響力)學科排名
書目名稱Control of Sandwich Nonlinear Systems網(wǎng)絡公開度
書目名稱Control of Sandwich Nonlinear Systems網(wǎng)絡公開度學科排名
書目名稱Control of Sandwich Nonlinear Systems被引頻次
書目名稱Control of Sandwich Nonlinear Systems被引頻次學科排名
書目名稱Control of Sandwich Nonlinear Systems年度引用
書目名稱Control of Sandwich Nonlinear Systems年度引用學科排名
書目名稱Control of Sandwich Nonlinear Systems讀者反饋
書目名稱Control of Sandwich Nonlinear Systems讀者反饋學科排名
作者: 拖債 時間: 2025-3-21 21:27 作者: 離開 時間: 2025-3-22 00:44 作者: 搖擺 時間: 2025-3-22 07:53 作者: 學術討論會 時間: 2025-3-22 10:52
Friction Compensation for A Sandwich Dynamic System,s important to design control strategies that can alleviate the performance deterioration due to friction. In addition to the disruptive nature of friction and the lack of an universal model of friction, friction compensation is further complicated by the fact that friction parameters vary with temperature and age.作者: osteocytes 時間: 2025-3-22 15:29
Control of Systems with Sandwiched Backlash,sation and tracking control can be both achieved. Nonlinear zero dynamics systems caused by joint damping are bounded-input, bounded state stable so that feedback linearization control designs ensure that all closed-loop signals are bounded and asymptotic tracking is achievable.作者: osteocytes 時間: 2025-3-22 20:07
Book 20032003. Springer-Verlag Berlin Heidelberg 2003 A. Taware and G. Tao: Control of Sandwich Nonlinear Systems, LNCIS 288, pp. 9-16, 2003. Springer-Verlag Berlin Heidelberg 2003 x(t), pilot valve piston position Return Pressure Source Return Load M, b y(t) A. Taware and G. Tao: Control of Sandwich Nonline作者: 旅行路線 時間: 2025-3-22 21:54
https://doi.org/10.1007/978-3-662-24723-5, aircraft accidents have been caused by actuator failures. The compensation of actuator nonlinearities is equally important as they limit both static and dynamic performance of control systems. These nonlinearities are typically nonsmooth nonlinearities such as dead-zone, hysteresis and backlash.作者: prodrome 時間: 2025-3-23 02:10
Control of Systems with Actuator Nonlinearities and Failures,, aircraft accidents have been caused by actuator failures. The compensation of actuator nonlinearities is equally important as they limit both static and dynamic performance of control systems. These nonlinearities are typically nonsmooth nonlinearities such as dead-zone, hysteresis and backlash.作者: harpsichord 時間: 2025-3-23 08:10 作者: mercenary 時間: 2025-3-23 09:53
Adaptive Inverse Hybrid Design,as to be adaptively estimated. Depending upon the availability of the measurement of the input to the known nonlinearity .(·), .(.), or the output of .(·), .(.), two hybrid control schemes have been developed in Chapter 4.作者: Basal-Ganglia 時間: 2025-3-23 15:01 作者: Agility 時間: 2025-3-23 18:50 作者: Ophthalmoscope 時間: 2025-3-24 01:10
978-3-540-44115-1Springer-Verlag Berlin Heidelberg 2003作者: addition 時間: 2025-3-24 02:21 作者: Detoxification 時間: 2025-3-24 08:56
Lecture Notes in Control and Information Scienceshttp://image.papertrans.cn/c/image/237416.jpg作者: drusen 時間: 2025-3-24 14:45 作者: Ligament 時間: 2025-3-24 15:06 作者: 有害 時間: 2025-3-24 20:51 作者: Functional 時間: 2025-3-24 23:48 作者: Accolade 時間: 2025-3-25 05:33
Vermittlung emotionaler Erlebniswerteerator: .[.](.) = .(.), or the Laplace transform operator as the case may be, .(.) is the accessible control input, .(.) is the measured output, . .(.) and. .(.) are both rational transfer functions with their denominator degrees being . . and . . respectively, and .(·) is the nonsmooth nonlinearity作者: 悲觀 時間: 2025-3-25 08:13
,Zusammenhangsma?e und Regression,fect is canceled effectively in a short time by adaptive schemes. It is proposed to use the inverse models of the sandwiched nonlinearities. The compensator for the sandwiched nonlinearity, .(.) = .(.(.)), is .(.) = .(. .(.)), where .(·) is the desired inverse of .(·) and . .(.) is the control input作者: 儲備 時間: 2025-3-25 15:37
https://doi.org/10.1007/978-3-662-22593-6m with a sandwiched dead-zone. It was seen that the dynamics of . .(.) limit the effectiveness of a dead-zone inverse on the sandwiched dead-zone. In those schemes, partial state feedback, dynamic output feedback and a full state feedback with a dynamic phase difference compensator acting on the ref作者: idiopathic 時間: 2025-3-25 17:26 作者: 謙虛的人 時間: 2025-3-25 22:30
https://doi.org/10.1007/978-3-662-22594-3plications in control can be broadly classified into two sorts: identification and control. In this chapter, it is intended to use NN for closed-loop control of a system with a dead-zone sandwiched in between two dynamic blocks. An adaptive version of the hybrid control scheme presented in Chapter 4作者: CHIDE 時間: 2025-3-26 02:53
Vorlesungen über Technische Akustiktion is a natural occurrence that affects all objects in motion. It is present in servo-mechanisms, hydraulic systems, pneumatic systems and most other mechanical systems. It results from a complex microscopic phenomena dependent on surface material, characteristics of lubrication between the surfac作者: 運氣 時間: 2025-3-26 07:56
Die Entstehung der Schallwellen, instead of two linear dynamic blocks. One such system is a single-link two-body system such as a manipulator arm with friction affecting the motion of the load having nonlinear dynamics driven by a motor, where the connection between the two bodies is through a flexible rod. Friction is acting on t作者: 贊成你 時間: 2025-3-26 09:04 作者: GLIB 時間: 2025-3-26 15:34 作者: synovitis 時間: 2025-3-26 17:14
https://doi.org/10.1007/978-3-662-24724-2e research done in this work. The need to develop control schemes for multivariable sandwich nonlinear systems with joint flexibility and damping was a motivating factor as well. The problem of actuator failure compensation for systems with nonsmooth nonlinearities has also been addressed.作者: compose 時間: 2025-3-27 00:49 作者: 陶器 時間: 2025-3-27 04:50 作者: NEG 時間: 2025-3-27 07:30
Problem Formulation,rity may be nonlinear as well. For example, . .(.) or . .(.) or both may be nonlinear. In that case, the problem will be essentially more challenging. The control schemes will be resultantly different than if both the blocks are linear. In this book, primarily, control of sandwich systems where . .(作者: 中和 時間: 2025-3-27 10:49 作者: 財主 時間: 2025-3-27 13:49 作者: textile 時間: 2025-3-27 18:15
Adaptive Friction Compensation Based on Feedback Linearization,mics. For such a nonlinear system that has sandwiched friction and dynamics, an adaptive feedback friction compensating controller is developed with the requirement that the system be feedback linearizable and minimum phase whenever load velocity is not zero. Whenever load velocity is zero, with the作者: 荒唐 時間: 2025-3-28 00:13
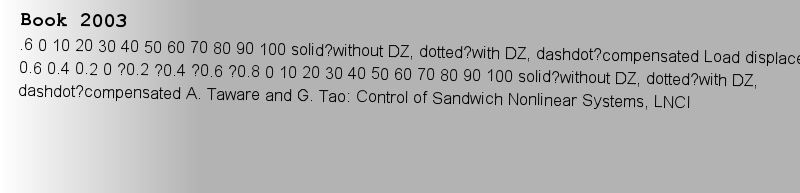
0170-8643 0 solid?without DZ, dotted?with DZ, dashdot?compensated A. Taware and G. Tao: Control of Sandwich Nonlinear Systems, LNCI978-3-540-44115-1978-3-540-46127-2Series ISSN 0170-8643 Series E-ISSN 1610-7411 作者: 松果 時間: 2025-3-28 04:42 作者: 音樂戲劇 時間: 2025-3-28 08:45
Vermittlung emotionaler Erlebniswerterity may be nonlinear as well. For example, . .(.) or . .(.) or both may be nonlinear. In that case, the problem will be essentially more challenging. The control schemes will be resultantly different than if both the blocks are linear. In this book, primarily, control of sandwich systems where . .(作者: 灰心喪氣 時間: 2025-3-28 13:17
,Zusammenhangsma?e und Regression,ystem can be approximately canceled by state feedback or output feedback around it and if . .(.) is preceded by the inverse of the sandwiched nonlinearity, then it may approximately cancel .(·) following the . .(.) block [83], [82].作者: 裙帶關系 時間: 2025-3-28 14:44
https://doi.org/10.1007/978-3-662-22594-3w for achieving desired output tracking [86]. The dead-zone compensator consists of two NN’s, one used as an estimator of the sandwiched dead-zone function and the other for the compensation itself. To approximate jump functions such as a dead-zone inverse, it is found that the NN that uses smooth a作者: inclusive 時間: 2025-3-28 19:49
Die Entstehung der Schallwellen,mics. For such a nonlinear system that has sandwiched friction and dynamics, an adaptive feedback friction compensating controller is developed with the requirement that the system be feedback linearizable and minimum phase whenever load velocity is not zero. Whenever load velocity is zero, with the作者: nugatory 時間: 2025-3-29 02:49
Introduction,, such as mechanical connections, hydraulic actuators and electric servomotors [47], [51], [91]. In most cases, they are caused by imperfections of system component characteristics. A dead-zone is a static “memoryless” nonlinearity which describes the component’s insensitivity to small signals. Back作者: compose 時間: 2025-3-29 04:14
Problem Formulation,erator: .[.](.) = .(.), or the Laplace transform operator as the case may be, .(.) is the accessible control input, .(.) is the measured output, . .(.) and. .(.) are both rational transfer functions with their denominator degrees being . . and . . respectively, and .(·) is the nonsmooth nonlinearity作者: Melanocytes 時間: 2025-3-29 10:52