標(biāo)題: Titlebook: Biomimetic and Biohybrid Systems; 6th International Co Michael Mangan,Mark Cutkosky,Nathan Lepora Conference proceedings 2017 Springer Inte [打印本頁] 作者: Colossal 時間: 2025-3-21 19:01
書目名稱Biomimetic and Biohybrid Systems影響因子(影響力)
書目名稱Biomimetic and Biohybrid Systems影響因子(影響力)學(xué)科排名
書目名稱Biomimetic and Biohybrid Systems網(wǎng)絡(luò)公開度
書目名稱Biomimetic and Biohybrid Systems網(wǎng)絡(luò)公開度學(xué)科排名
書目名稱Biomimetic and Biohybrid Systems被引頻次
書目名稱Biomimetic and Biohybrid Systems被引頻次學(xué)科排名
書目名稱Biomimetic and Biohybrid Systems年度引用
書目名稱Biomimetic and Biohybrid Systems年度引用學(xué)科排名
書目名稱Biomimetic and Biohybrid Systems讀者反饋
書目名稱Biomimetic and Biohybrid Systems讀者反饋學(xué)科排名
作者: 躲債 時間: 2025-3-21 20:28
Animal and Robotic Locomotion on Wet Granular Media, complex granular substrates has hindered the development of terrestrial/all-terrain robots. Although there has been recent performance of experimental and computational studies of dry granular media, wet granular media remain largely unexplored. In particular, this encompasses animal locomotion ana作者: headway 時間: 2025-3-22 04:04 作者: 銼屑 時間: 2025-3-22 05:43 作者: ENACT 時間: 2025-3-22 11:57
Bioinspired Magnetic Navigation Using Magnetic Signatures as Waypoints,tance migration across continents and ocean basins. However, despite extensive research, animal magnetoreception remains a poorly understood, and active research area. Concurrently, Earth’s magnetic field offers a signal that engineered systems can leverage for navigation and localization in environ作者: 品嘗你的人 時間: 2025-3-22 15:18
Jellyfish Inspired Soft Robot Prototype Which Uses Circumferential Contraction for Jet Propulsion,e. Using circumferential contraction, water is pushed out the bottom of the bell creating upwards thrust. Jellyfish use this basic movement along with more complex features to move around the seas. In this paper, we attempt to mimic this circumferential contraction using hydraulically actuated silic作者: Extricate 時間: 2025-3-22 18:46
,You Made Him Be Alive: Children’s Perceptions of Animacy in a Humanoid Robot,nces. These features may have significant impact on how people perceive and engage with robots; young children may be particularly influenced due to their developing ideas of agency. Young children are considered to hold naive beliefs of animacy and a tendency to mis-categorise moving objects as bei作者: 引水渠 時間: 2025-3-23 00:17 作者: HUSH 時間: 2025-3-23 02:14 作者: 帽子 時間: 2025-3-23 07:17
Automated Calibration of a Biomimetic Space-Dependent Model for Zebrafish and Robot Collective Behaobots should behave in a biomimetic manner with close loop interactions between robots and animals. Behavioural zebrafish experiments show that their individual behaviours depend on social interactions producing collective behaviour and depend on their position in the environment. Based on those obs作者: 圓柱 時間: 2025-3-23 11:50 作者: 吞沒 時間: 2025-3-23 15:25
Development of Novel Foam-Based Soft Robotic Ring Actuators for a Biomimetic Peristaltic Pumping Syapplication area of soft robotics. Most systems are based on pneumatic network (pneu-net) fluidic elastomer actuators or artificial muscle actuators. In this study the development of a pump actuated by foam-based, flexible, compliant and lightweight ring actuators is presented. Utilizing a custom bu作者: 熟練 時間: 2025-3-23 22:05 作者: 臭了生氣 時間: 2025-3-24 01:56
Effects of Locomotive Drift in Scale-Invariant Robotic Search Strategies,s crust, explore our oceans, traverse high radiation areas, navigate in outer space, etc. The harsh conditions and large amounts of uncertainty of these environments can complicate the use of global positioning systems, and in some cases robots have to depend exclusively in local information as exte作者: 描繪 時間: 2025-3-24 04:52
Simulation of Human Balance Control Using an Inverted Pendulum Model,t there are many concurrent control loops occurring in the central nervous system that achieve stability for a variety of postural perturbations. Though many engineering models of human balance control have been tested, no models of how these controllers might operate within the nervous system have 作者: 簡潔 時間: 2025-3-24 06:30
,Reducing Versatile Bat Wing Conformations to?a 1-DoF Machine,retains the ability to flap and fold-unfold its wings in flight. However, this bat-like robot has been unable to perform folding-unfolding of its wings within the period of a wingbeat cycle, about 100?ms. The DC motors operating the spindle mechanisms cannot attain this folding speed. Biological bat作者: Mingle 時間: 2025-3-24 12:52 作者: choroid 時間: 2025-3-24 15:55 作者: chassis 時間: 2025-3-24 19:04 作者: 褲子 時間: 2025-3-25 03:12
Yectli A. Huerta,Brent Swartz,David J. Liljahm that was used for propelling a design of a robotic fish based on Mackerel in a straight swimming motion. The approach used is fundamentally called built in motion pattern algorithm as against follow the leader approach and mathematically generated serpentine motion used in hyper-redundant robot m作者: 多骨 時間: 2025-3-25 03:39 作者: terazosin 時間: 2025-3-25 07:57 作者: 直覺沒有 時間: 2025-3-25 15:25
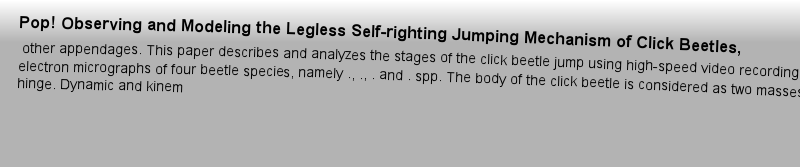
Improving Fortran Performance Portability other appendages. This paper describes and analyzes the stages of the click beetle jump using high-speed video recordings and scanning electron micrographs of four beetle species, namely ., ., . and . spp. The body of the click beetle is considered as two masses linked by a hinge. Dynamic and kinem作者: 提升 時間: 2025-3-25 19:37
Yectli A. Huerta,Brent Swartz,David J. Liljatance migration across continents and ocean basins. However, despite extensive research, animal magnetoreception remains a poorly understood, and active research area. Concurrently, Earth’s magnetic field offers a signal that engineered systems can leverage for navigation and localization in environ作者: 不可知論 時間: 2025-3-25 22:37
https://doi.org/10.1007/978-3-030-95953-1e. Using circumferential contraction, water is pushed out the bottom of the bell creating upwards thrust. Jellyfish use this basic movement along with more complex features to move around the seas. In this paper, we attempt to mimic this circumferential contraction using hydraulically actuated silic作者: 假裝是我 時間: 2025-3-26 00:40
Janaan Lake,Tharindu R. Patabandi,Mary Hallnces. These features may have significant impact on how people perceive and engage with robots; young children may be particularly influenced due to their developing ideas of agency. Young children are considered to hold naive beliefs of animacy and a tendency to mis-categorise moving objects as bei作者: –DOX 時間: 2025-3-26 05:34
Lecture Notes in Computer Sciencerning machine. This paper outlines the multiple disadvantages of deep learning and offers a view into the implications to solving these problems and how this would affect the state of the art not only in developmental learning but also in real world applications.作者: 拋棄的貨物 時間: 2025-3-26 12:33
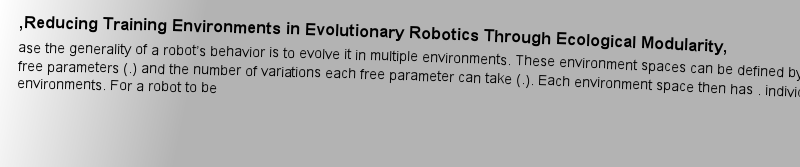
Network-Aware Parallel Computing with Remosase the generality of a robot’s behavior is to evolve it in multiple environments. These environment spaces can be defined by the number of free parameters (.) and the number of variations each free parameter can take (.). Each environment space then has . individual environments. For a robot to be 作者: 沒花的是打擾 時間: 2025-3-26 15:41 作者: 拉開這車床 時間: 2025-3-26 19:27
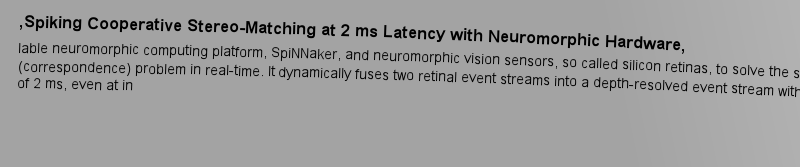
Formalizing Structured Control Flow Graphslable neuromorphic computing platform, SpiNNaker, and neuromorphic vision sensors, so called silicon retinas, to solve the stereo matching (correspondence) problem in real-time. It dynamically fuses two retinal event streams into a depth-resolved event stream with a fixed latency of 2?ms, even at in作者: Choreography 時間: 2025-3-26 23:40 作者: 指令 時間: 2025-3-27 01:24
Pengcheng Li,Dhruva R. Chakrabartiis for complex, multi-scale and dynamic models of cellular metabolism in health and disease. Accordingly, the functional triad of genomics, transcriptomics and metabolomics is regarded as a foundational methodology in systems biology. Opening up a never-before seen vista into the organization and dy作者: faculty 時間: 2025-3-27 07:15
https://doi.org/10.1007/978-3-319-52709-3s crust, explore our oceans, traverse high radiation areas, navigate in outer space, etc. The harsh conditions and large amounts of uncertainty of these environments can complicate the use of global positioning systems, and in some cases robots have to depend exclusively in local information as exte作者: opinionated 時間: 2025-3-27 12:18
Lecture Notes in Computer Sciencet there are many concurrent control loops occurring in the central nervous system that achieve stability for a variety of postural perturbations. Though many engineering models of human balance control have been tested, no models of how these controllers might operate within the nervous system have 作者: bibliophile 時間: 2025-3-27 14:12 作者: 出處 時間: 2025-3-27 21:41 作者: committed 時間: 2025-3-28 01:36 作者: dissolution 時間: 2025-3-28 04:24
https://doi.org/10.1007/978-3-030-99372-6 Through the development of a bio-inspired robotic platform – CTurtle – we show that (1) these ontogenetic changes apparently occupy stable extrema for either load-bearing or high-velocity movement, and (2) mimicry of these variations in a robotic system confer greater load-bearing capacity and ener作者: artifice 時間: 2025-3-28 08:07 作者: 樹木心 時間: 2025-3-28 13:30
Lecture Notes in Computer Sciencerning machine. This paper outlines the multiple disadvantages of deep learning and offers a view into the implications to solving these problems and how this would affect the state of the art not only in developmental learning but also in real world applications.作者: 客觀 時間: 2025-3-28 14:46
Michael Mangan,Mark Cutkosky,Nathan LeporaIncludes supplementary material: 作者: GIBE 時間: 2025-3-28 19:45 作者: 冥界三河 時間: 2025-3-29 02:40 作者: stressors 時間: 2025-3-29 03:04
978-3-319-63536-1Springer International Publishing AG 2017作者: fibula 時間: 2025-3-29 08:16 作者: Melatonin 時間: 2025-3-29 12:52
Conference proceedings 2017 CA, USA, in July 2017.The 42 full and 19 short papers presented in this volume were carefully reviewed and selected from 63 submissions. The theme of the conference encompasses biomimetic methods for manufacture, repair and recycling inspired by natural processes such as reproduction, digestion, morphogenesis and metamorphosis..作者: Innocence 時間: 2025-3-29 18:21
https://doi.org/10.1007/978-3-030-95953-1ing a pump with a simple on-off control which switches dependent on the internal pressure of the hydraulic system. This very simple control mechanism is similar to real jellyfish, and much like jellyfish, our design attempts to use both passive and active movements to maximize thrust.作者: abnegate 時間: 2025-3-29 21:22
Xiaoming Li,Sunita Chandrasekarancouple the flapping cycle to the folding cycle of the robot. We then use biological data to further optimize the mechanism such that the kinematic synergies of the robot best match those of a biological bat. This ensures that folding is performed at the correct point in the wingbeat cycle.作者: custody 時間: 2025-3-30 03:55 作者: ANNUL 時間: 2025-3-30 04:40 作者: 誘拐 時間: 2025-3-30 08:56 作者: vasculitis 時間: 2025-3-30 13:00 作者: antecedence 時間: 2025-3-30 16:50 作者: frozen-shoulder 時間: 2025-3-30 23:50 作者: Phenothiazines 時間: 2025-3-31 04:43
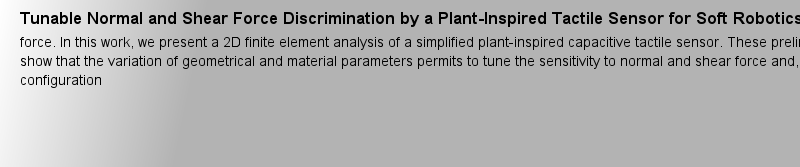
Tunable Normal and Shear Force Discrimination by a Plant-Inspired Tactile Sensor for Soft Robotics,that the variation of geometrical and material parameters permits to tune the sensitivity to normal and shear force and, with particular configurations, to discriminate between the two forces with a simple electrical layout and no signal processing.作者: 密碼 時間: 2025-3-31 08:59 作者: CUMB 時間: 2025-3-31 10:55 作者: 圍裙 時間: 2025-3-31 14:15 作者: 紅腫 時間: 2025-3-31 17:46 作者: Chronic 時間: 2025-3-31 22:31
Lecture Notes in Computer Scienceign the simulation and hardware progress. New control methods are found based on this model, which reduced the motion slip on the robot. In future work, this simulation can help us control and design future mesh-based robots.作者: 大方一點 時間: 2025-4-1 02:36 作者: 痛苦一生 時間: 2025-4-1 10:00
Conference proceedings 2017 CA, USA, in July 2017.The 42 full and 19 short papers presented in this volume were carefully reviewed and selected from 63 submissions. The theme of the conference encompasses biomimetic methods for manufacture, repair and recycling inspired by natural processes such as reproduction, digestion, mo作者: LAVA 時間: 2025-4-1 11:01 作者: 津貼 時間: 2025-4-1 15:31 作者: 勉強(qiáng) 時間: 2025-4-1 20:43 作者: intuition 時間: 2025-4-2 02:10 作者: 想象 時間: 2025-4-2 03:31
,Bio-inspired Robot Design Considering Load-Bearing and Kinematic Ontogeny of?Chelonioidea Sea Turtlgy efficiency, at the expense of velocity (or vice-versa). A possible means of adapting to load conditions is also proposed. We endeavor to provide these results as part of a theoretical framework integrating biological inquiry and inspiration within an iterative design cycle based on laminate robotics.作者: 虛假 時間: 2025-4-2 08:44
Straight Swimming Algorithm Used by a Design of Biomimetic Robotic Fish,ode, like the other methods that involve onboard mathematical position generation, it can however save battery life. This method works perfectly because of the unique design of the robot hardware. A field test yield 1/3 of the speed (3.66?km/h) of a life Mackerel.